Artificial Finger
Introduction
yash101
Published 1/2/2018
Updated 1/2/2018
Article Note:
This article is quite old and was pulled from my high school / college writing archive. Expect errors and issues with the content.
I was thinking, how do we determine what we are touching when we aren’t
looking at our fingers? I realized that our nerve endings are very sensitive
and can feel some of the lightest vibration. It also dawned on me that perhaps
the texture on our fingers - our fingerprints - vibrate differently when
feeling a different surface.
Why Does This Matter?
Physiology
Understanding how we are able to sense our environment is important for many
reasons. Perhaps, if we determine the sequence of action potentials that take
place when we feel a material, we may be able to develop an electro-mechanical
transducer for prosthetics. More importantly, we get to better understand our
senses.
Robotics
A large portion of robotics surrounds the field of “localization,” the process
through which a device captures, processes and understands the environment it
is in. In the future, a robot could be built, which learns its surroundings by
touching materials and taking pictures of them.
The Sensor
Our fingerprints composed of many ridges in a random, but organized pattern.
If you place your finger carefully on a surface, without rubbing it at all,
while not looking, you cannot determine what surface you are touching. But as
soon as you rub the surface, you can feel vibrations that determine physical
properties such as smoothness of the surface. You can also determine the
flexibility of a surface by applying a constant pressure to it, but
determining how far in your finger moved. The actual sensor consists of a
motion sensor that can determine vibrations, as well as position, and an air
pressure sensor to determine contact pressure. These sensors are placed within
an inflated, air-tight chamber such that any external pressure on this chamber
will cause a rise in the internal air pressure. This can be measured by the
air pressure sensor. A picture of how this sensor could look is below.
Front:

Side:
Bottom (External):


Build Guide
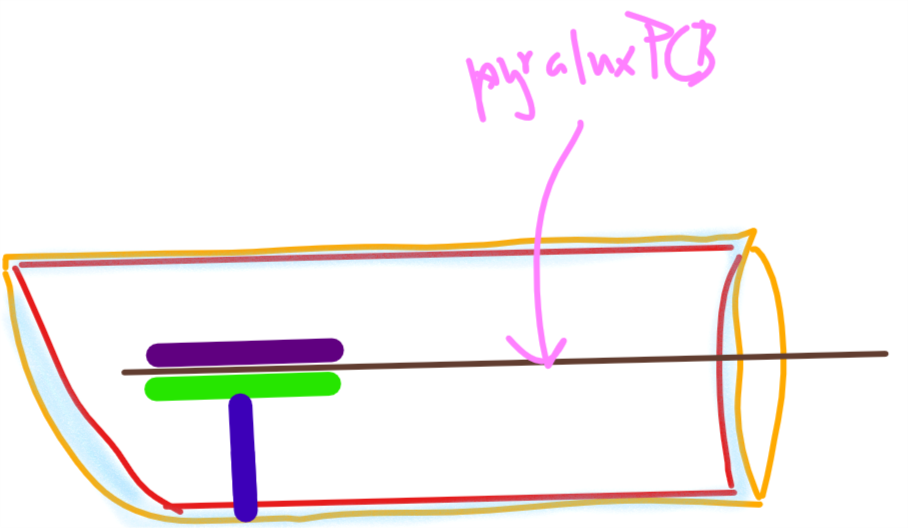
At the bottom of the finger, to the IMU, there is a mechanical link. If the
sensor is just suspended inside the air chamber, very little vibrations will
be transmitted into the IMU. The PCB should be made of a flexible material
like DuPont Pyralux. This will allow the sensors to move in the finger,
constrained by the mechanical link. The airtight bag should be heat sealed
around the PCB. If this bag loses air, the sensor may not work properly. An
alternative would be to use a different type of a pressure transducer. Air
pressure sensors are very cheap, but there are many types of flexion sensors.
My Prototype (Under Development)
The prototype will currently only have an IMU. For the IMU, I will be using a
six axis IMU from ST Microelectronics, the LSM6DSM. It has a 16 bit resolution
for its accelerometer and gyroscope axes. Its accelerometer is capable of
about 5k samples per second per axis. Its gyroscope can handle 1.5k samples
per second per axis. The main processor for this project will be an ESP32 by
Espressif Systems. It’s a dual core, 240 MHz CPU with WiFi and Bluetooth. I am
using a prebuilt module, the esp32-wrover. I chose the esp32-wrover module
because it has an extra 32 Mbit of external SRAM, allowing for a significantly
larger capture buffer. The ESP32 can capture and send its data over WiFi to a
computer running data acquisition software, or directly onto a server. The
main processor board has a 32 GB SD card for headless data acquisition and a
Lithium polymer PMIC for power. See ya next time!